
The radar is a detection system that was developed before and during World War II for military uses, though by today it has many other applications including, for example, astronomical and geological research. The name radar is an acronym for RAdio Detection And Ranging, and as its name says, it uses radio waves to detect targets. In this post we will try to understand one of the basic ideas behind the operation of the radar, which while it seems quite simple at first glance, when we start to try to understand the details, we encounter an interesting problem. In order to solve it we will need to use a mathematical theorem first formulated by the Chinese mathematician Sunzi from the 3rd century AD.
For an English video version of this post – https://youtu.be/OoWoxBhixDI
For a Hebrew video version of this post – https://youtu.be/30CEOB_j3Ag
Let us begin with this basic idea. Suppose that we are in the control center of an airport and we want to find the distance of a nearby plane. In order to find this distance, we transmit a radio wave in the general direction of the plane, and once the wave hits the plane, it is reflected back, and is eventually captured by the receiver inside the radar. The radio wave is an electromagnetic radiation, and as such it moves at the speed of light which is 



While this was a very simple computation, in real life, this is much more complicated. For example, maybe the wave is not strong enough to make it all the way to the target and back, there can be multiple targets, we can receive back waves from other objects which are not the intended targets (like the sea or earth), and many other problems. These are all interesting engineering problems, which contain in themselves mathematical ideas, but for this post we will ignore these problems and we will focus on another problem arising from a very simple reason – our targets move!
Consider again the wave that travels from the transmitter of the radar to the target plane. As we said before, when it hits the plane it get reflected and return to the radar. The problem is that in the end the radar only computes the distance to where the wave got reflected, but in the meanwhile the plane can move away from that location. It can also move outside of the range of our radar, or other planes can move inside the range, so we must update our data all the time.
At a first glance, this doesn’t seem to be too much of a problem, since instead of sending a single wave, we can just send many of them, one after the other, so that we will keep getting more and more updates. But here we encounter our problem – if we send the same type of wave again and again, then when the radar receives a wave back, it doesn’t know which is it from all the waves that it transmitted. And if the radar doesn’t know that, then it cannot compute the time it took the wave to go to the target and back, so our computation from before fails.
However, not all is lost. Let us number our waves using integers …,-2,-1,0,1,2,… and suppose that we transmit one wave every 





This ambiguity might not be so bad. If for example 






To summarize, if the radar uses a high frequency wave, namely if 

Let us formulate our problem mathematically. To simplify our problem, let us first choose a basic measure of distance, say 1 cm, and assume that all the distances that we have are multiples of it. In particular, our distances can be measured using integer numbers. If we let 






This type of relation is well known in mathematics, and is called congruence. In particular we say that 

Now, for our radar problem, let us assume that we want to know the distance to the plane modulo at least 


The first approach is to send waves of length 1 cm which satisfy our conditions for good updates. We also make sure that the waves look different enough in the first 10 km, and only after this they can repeat themselves. For example, the 



The second approach is to use some interesting properties of integers which are coprime, but before we define this property, let us see it in action.
Suppose that we send two types of waves, one at length 




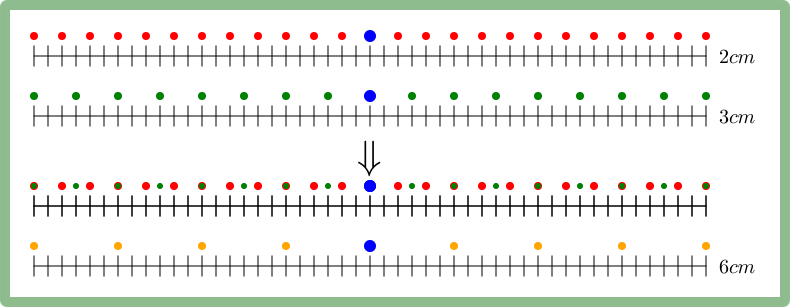
This was not special just to 2 and 3, and we can, for example, do it to the eight waves at lengths 


So with just 8 different types of waves, we satisfy out two conditions, and actually get the location modulo almost 100 km (unlike previously where we used
The result that we just used is called the Chinese Remainder Theorem (CRT). In our notation above, we can formulate it as follows:
Definition: Two integers 




The Chinese Remainder Theorem: Let 





In particular, distinct prime numbers are always coprime, so in our radar example, if we know what is
Before we prove CRT, we need a lemma which characterize coprime numbers. This lemma is usually seen in the first abstract algebra course you take (and sometimes even sooner), and is part of a much bigger theory of algebraic structures. However, I will show here only an elementary proof, without going into the theory behind it. In general, some of the ideas below might seem weird to someone who never learned any abstract algebra, though all of them are quite natural when learned in a proper way (and I might even write a post about it some day…).
Lemma: Let 


Proof: Assume first that we can find 



On the other hand, assume that 




We chose 


Now that we have this lemma, we can prove the CRT.
Proof (Chinese Remainder Theorem): Assume that 







satisfy both of our conditions (You should check this and make sure that you understand what happened here).
Now that we have at least one solution, we want to find all the other solutions. Lets say that there is another solution 





By our assumption, we can write 


so that
As I said before, the proofs above might seem like tricks to people unfamiliar with abstract algebra, though once one is used to the language and objects in this area, the process above becomes much more natural. In any way, we have only used some elementary congruence relations to prove the CRT, proving that our computation in the example of the radar was correct.
Even if you didn’t follow all of the computations above, there is one idea that is very important here. What the CRT tells us, is that if we want to solve the big problem of finding what is
Congruence problems are quite common in mathematics, so that this divide and conquer approach in the CRT make it very useful, in particular in problems in number theory. In particular, what we usually do it to “divide” our congruence problems to modulo prime power (for example mod 


The CRT also has a more generalized form which is applicable in other places. For example, a very common process in the general sciences is polynomial extrapolation. Namely, there is a polynomial of some fixed degree that we want to find, but we are not given all the information about this polynomial (i.e. all the coefficients). On the other hand, we are given some “local” information – the value of the polynomial at certain points. A very early result in the studies of probably every engineering student is that a polynomial of degree 

One can even take this approach much further. Indeed, in the base of it, the Fourier transform which is used in signal processing all around the world, is just an infinite dimensional type of CRT. The Fourier transform tells us that when ever we have a periodic function (which is usually what we send in all those information wires which connect most of our thinking machines), this periodic function can be decomposed into “parts” which are the sines and cosines. Again, we see the usefulness of the divide and conquer approach – it is usually hard to work with a difficult periodic function, however it is much easier to work with a specific sine (or cosine) function.
In general, once you are used to working on mathematical problems (and problems in general), you learn to look for divide and conquer type results which decompose your problems to it basic blocks, in the hope that you can understand these blocks better. In particular, in the CRT we decompose to product coprime numbers. Since the product of small numbers can still be very large, what managed to show that with a very few different types of waves, we can get a lot of information.

Reblogged this on FPGA Base X and commented:
Wonder whether this can be used to triangulate a WiFi or Bluetooth device by reproducing the originally sent data from the package and then comparing it to what has been received. Then doing the CRM for coprime wavelengths within the given package!
Love this post. Had a similar idea for COVID-19 distance monitoring – in theory.